تطور أنظمة التحكم في المركبات الفضائية السوفيتية المبكرة

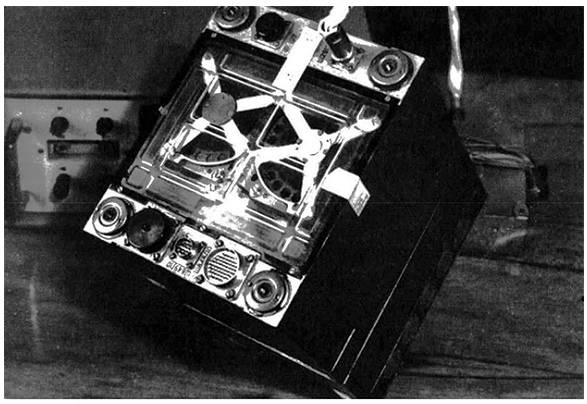
نموذج "سبوتنيك -1" مع عرض للأجهزة الداخلية. صورة لمتحف رواد الفضاء
من الصعب تخيل مركبة فضائية حديثة ، يمكن التخلص منها أو يمكن إعادة استخدامها ، محلية أو أجنبية ، بدون نظام تحكم معقد مبني على أساس أجهزة كمبيوتر عالية الأداء. ومع ذلك ، لم يكن هذا هو الحال دائمًا. لم يكن للمركبة الفضائية التي صممها الاتحاد السوفيتي أي أنظمة تحكم على الإطلاق. ثم ظهرت أولى الأجهزة البسيطة على الأجهزة ، وأدى تطورها الإضافي إلى ظهور أجهزة كمبيوتر كاملة الوظائف متعددة الوظائف.
على طول مسار محدد سلفًا
لم يكن لدى المجسات والأجهزة المحلية والأجنبية المستخدمة في التجارب والأبحاث المبكرة في مجال الصواريخ وتكنولوجيا الفضاء أنظمة تحكم كاملة. على متن الطائرة كانت هناك أجهزة أتمتة للوحدات والأنظمة الفردية ، ولكن لم يتم توفير إمكانية التحكم الكامل في الطيران. علاوة على ذلك ، في ذلك الوقت لم تكن هناك حاجة لهم.
على سبيل المثال ، كان أول قمر صناعي أرضي SP-1 (Sputnik-1) ، الذي تم إطلاقه في أكتوبر 1957 ، يحتوي على بطارية وجهاز إرسال لاسلكي ومجموعة من أجهزة الاستشعار ومعدات التبريد على متنه. لم تكن هناك أجهزة لتحديد الإحداثيات والموقع في الفضاء ، وكذلك التحكم في الطيران. كان من المفترض أن يتحرك القمر الصناعي على طول المسار المحدد عند إطلاقه.

موديل "سبوتنيك -2". في الحالة الصغيرة كان هناك "كوخ" به مكان للكلب. الصورة من ويكيميديا كومنز
تم بناء Sputnik-2 التالية وفقًا لمبدأ مماثل ، كانت حمولته عبارة عن حاوية مع كلب Laika. على متن السفينة كانت هناك أدوات فقط لجمع ونقل البيانات عن حالة الحيوان. ومع ذلك ، تم أيضًا تصور أتمتة بعض العمليات ، مثل تبريد حاوية صالحة للسكن.
جهاز التحكم عن بعد
حتى في مرحلة الدراسة الأولية ، أصبح من الواضح أن تكنولوجيا الفضاء الواعدة يجب أن يكون لها وسائل تحكم معينة. بشكل مستقل أو بناءً على أوامر من الأرض ، يجب أن تقوم الأقمار الصناعية بتشغيل الأدوات وإجراء البحوث وما إلى ذلك. تم حل مشاكل التصميم هذه بالفعل في بداية عام 1958 عند إنشاء المركبة الفضائية التالية.
في مايو 1958 ، ذهب سبوتنيك 3 أو الجسم D إلى المدار. لأول مرة في الممارسة المحلية ، تلقى هذا الجهاز وسائل التحكم الآلي والتحكم عن بعد. يمكن لمجمع الأجهزة الموجود على متن الطائرة تلقي الأوامر من محطة التحكم الأرضية وتنفيذها. كان هناك 12 جهازًا علميًا لأغراض مختلفة على متن الطائرة ، والتي تم تشغيلها وإيقافها عن طريق الأوامر أو عن طريق جهاز برنامج الوقت على متن الطائرة. بالإضافة إلى ذلك ، في أجزاء معينة من المدار ، حيث لم يكن هناك اتصال بالأرض ، تم تشغيل التسجيل عن بعد على شريط مغناطيسي تلقائيًا. بعد استعادة الاتصال ، تم نقل المعلومات المسجلة.
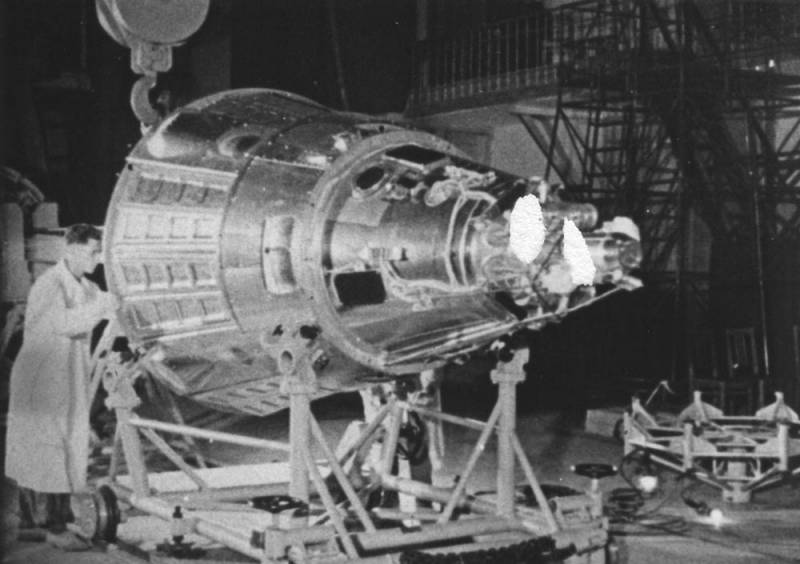
"سبوتنيك -3" / "D" في مرحلة التجميع. الصورة بواسطة RGANTD
وسرعان ما تم استخدام جهاز التحكم عن بعد للتحكم اللاسلكي في مجال البحث بين الكواكب. ابتداءً من خريف عام 1958 ، قام اتحاد الجمهوريات الاشتراكية السوفياتية بعدة محاولات لإرسال محطات آلية بين الكواكب إلى القمر. انتهت عمليات الإطلاق الأولى بحوادث ، وفقط في يناير 1959 ، تمكنت Luna-1 AMS من المرور بالقرب من القمر الصناعي الطبيعي للأرض. في سبتمبر من نفس العام ، هبطت المركبة الفضائية Luna-2 على القمر لأول مرة - بقوة ، مع تدمير الهيكل.
على متن منتجات Luna المبكرة ، كانت هناك مجموعة من أدوات القياس لأغراض مختلفة ، وأجهزة لمراقبة تشغيلها ، بالإضافة إلى محطة راديو لتلقي الأوامر وإرسال القياس عن بعد. للرحلة إلى القمر ، تم تثبيت المحطات على ما يسمى ب. بلوك "E" - المرحلة الثالثة من الصاروخ الحامل "Vostok-L" مع إمكانية التحكم عن بعد. كانت الوحدة مسؤولة عن إحضار مقياس الدعم الكلي إلى المسار المحسوب.
بعد الإطلاق ، تم تتبع رحلة صاروخ Vostok-L مع Luna من الأرض بواسطة معدات الرادار ، التي تم إنشاؤها في الأصل لاختبار الصواريخ الباليستية. تم استلام بيانات المسار ومعالجتها بواسطة نظام كمبيوتر خاص يعتمد على آلة BESM-2. عندما ينحرف المنتج "E" مع "القمر" عن المسار الأمثل ، قام المركب بتشكيل ونقل الأوامر إليه لتصحيح المسار. بشكل عام ، كان أداء هذا النظام جيدًا ، على الرغم من وجود أخطاء.
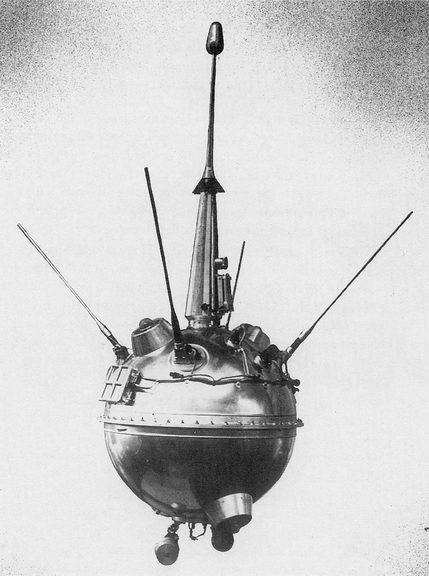
محطة أوتوماتيكية "Luna-2". الصورة من ويكيميديا كومنز
ميزات جديدة
يمكن للمركبة الفضائية المبكرة أن تطير فقط على طول مسار محسوب مسبقًا ، والذي تم إطلاقه بواسطة مركبة الإطلاق أو المرحلة العليا. لمزيد من تطوير البرامج الفضائية ، كان من الضروري تطوير بعض أدوات التحكم التي من شأنها أن تسمح للجهاز بالتوجيه في الفضاء وإجراء المناورات.
تم تحقيق النجاحات الأولى في هذا الاتجاه أثناء تطوير Luna-3 AMS ، والذي تم إطلاقه بنجاح في أكتوبر 1959. تم إنشاء نظام توجيه ضوئي تشيكا الأصلي لهذه المحطة. تضمنت عناصر بصرية تحدد موقع الشمس والقمر بالنسبة إلى AMS ، وجهاز حوسبة ومحركات تحويل. الاجهزة العلمية للمحطة كالسابق تعمل وفق البرنامج المحدد او الاوامر من مركز التحكم.
كان وجود نظام "Chaika" هو الذي سمح لـ "Luna-3" بتصوير القمر الصناعي الطبيعي للأرض ، بما في ذلك. جانبها العكسي. في المستقبل ، تم استخدام التطورات في هذا النظام وأفكاره الرئيسية بنشاط في مشاريع تكنولوجيا الفضاء الأخرى.
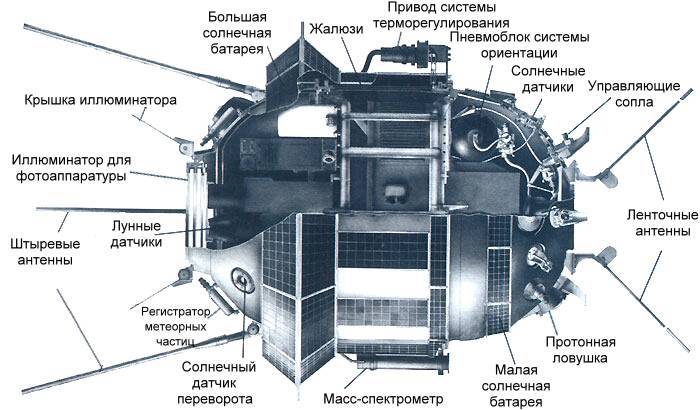
"لونا 3" مع نظام التوجيه "النورس". الرسومات Astronaut.ru
التحكم الذاتي
منذ عام 1957 ، تم تطوير مركبة فضائية مأهولة واعدة ، أطلق عليها لاحقًا اسم فوستوك ، قيد التنفيذ. حصل على أنظمة التحكم الآلي واليدوية التي تضاعف بعضها البعض. تميزت جميع الوسائل ببعض البساطة وتتوافق مع مجموعة المهام. لذلك ، جعلت المعدات من الممكن إجراء التوجيه في المدار والقيام بالنزول. وظائف أخرى كانت غائبة عمليا. للتوجيه في الفضاء ، كان للسفينة مجموعة من المحركات منخفضة الطاقة يتم التحكم فيها بواسطة الأتمتة أو رائد الفضاء.
تم إجراء المحاذاة الأفقية باستخدام مستشعرات الأشعة تحت الحمراء. على طول محور المدار ، تم توجيه السفينة بواسطة الشمس (تلقائيًا) أو بواسطة الأرض ، باستخدام جهاز Vzor (يدويًا). بشكل مستقل أو بناءً على الأمر ، يمكن أن تؤدي الأتمتة نزولًا من المدار باستخدام نظام دفع مكابح. طُلب من رائد الفضاء أداء هذه المهام بمساعدة جهاز الملاحة Globus ، الذي يحسب مساحة الهبوط التقريبية.
في مايو 1960 ، تم إطلاق أول مركبة تجريبية من طراز Vostok بتكوين غير مأهول. لم يتمكن الجهاز المسمى "Sputnik-4" من العودة إلى الأرض بسبب فشل في نظام التوجيه. ثم حدثت عدة عمليات إطلاق أخرى ، بما في ذلك. بحمولة على شكل معدات علمية وحيوانات ودمى. على سبيل المثال ، في 19 أغسطس 1960 ، ذهب بيلكا وستريلكا الشهيران إلى الفضاء. لأسباب واضحة ، كانت هذه الرحلات تستخدم فقط التحكم الآلي والتحكم عن بعد.

لوحة أجهزة القياس للمركبة الفضائية المأهولة "فوستوك". الصورة من ويكيميديا كومنز
أخيرًا ، في 12 أبريل 1961 ، تمت أول رحلة لطائرة فوستوك في تكوين مأهول. تحت سيطرة أول رائد فضاء رائد في العالم Yu.A. قامت سفينة جاجارين بمدار واحد وعادت بنجاح إلى الأرض. على مدار العامين التاليين ، تم إجراء خمس عمليات إطلاق أخرى لمركبة فوستوك الفضائية مع رواد فضاء وعدد كبير من الاختبارات بدون طيار. أكدت كل هذه الأنشطة قابلية تشغيل أنظمة التحكم الجديدة.
كمبيوتر المجلس
بالفعل أثناء تطوير المركبة الفضائية لونا أو فوستوك ، كان المتخصصون السوفييت يعملون على طرق أخرى لتطوير أنظمة التحكم في المركبات الفضائية و AMS. لذلك ، في أواخر الخمسينيات ، بدأ البحث حول موضوع إرسال المركبات الفضائية إلى المريخ. في البداية ، تم تنفيذ العمل في إطار برنامج 1M.
تم استبعاد استخدام التحكم في القيادة اللاسلكية في مثل هذا البرنامج فعليًا. الأدوات الآلية المنفصلة ، كما في المشاريع السابقة ، لها أيضًا عيوبها. في هذا الصدد ، تقرر إنشاء ما يسمى ب. وحدة حسابية تعتمد على كمبيوتر مركزي على متن الطائرة ، سيتم توصيل جميع أنظمة AMS الأخرى به. تم حل مهمة إنشاء SRB بنجاح ، علاوة على ذلك ، مع إدخال حلول جديدة وقاعدة مكونات حديثة. في الواقع ، كان الأمر يتعلق بجهاز كمبيوتر واحد على متن الطائرة يؤدي جميع المهام أثناء الرحلة.
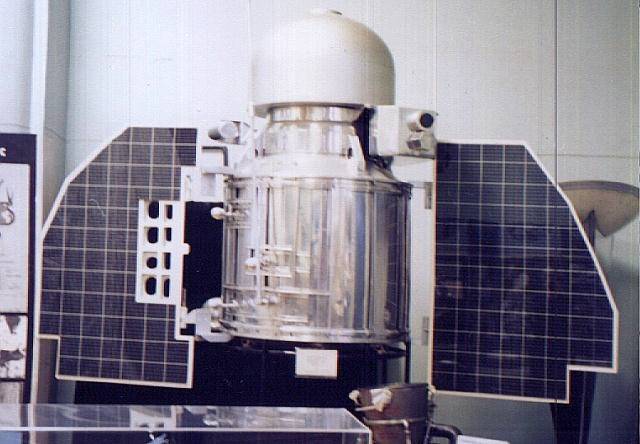
AMS "Mars-1960" مع جهاز كمبيوتر متكامل. الصورة من ويكيميديا كومنز
كجزء من برنامج 1M ، تم بناء محطتين من طراز Mars-1960. كان عليهم الطيران تلقائيًا بالقرب من المريخ ، وجمع البيانات العلمية ونقلها إلى الأرض. تم إطلاق كل من AMS في أكتوبر 1960 ، وانتهى الإطلاق بحوادث - احترقت المحطات في الغلاف الجوي. لم يكن من الممكن اختبار SRB أثناء الطيران.
ومع ذلك ، فإن التطورات على فكرة SRB لم تختف. سرعان ما بدأ تطوير "السفينة المكوكية الثقيلة" TMK ، والتي قرروا أيضًا تجهيزها بمجمع كمبيوتر واحد. لم يتوج هذا المشروع بالنجاح ، لكن مطوريه تمكنوا من المضي قدمًا مرة أخرى في إنشاء أجهزة كمبيوتر للفضاء.
أخيرًا ، كجزء من عمل TMK ، تم أخيرًا تشكيل مفهوم جهاز كمبيوتر واحد على متن الطائرة مسؤول عن جميع العمليات ومساعدة الطاقم. سرعان ما تم استخدام هذا المفهوم في إنشاء مركبة الفضاء المأهولة سويوز ، ومحطات ساليوت المدارية ، وعدد من المشاريع الأخرى.
إحدى كتل الكمبيوتر المحمول المبكرة للمركبة الفضائية سويوز. الصورة habr.com
العمليات التطورية
في الخمسينيات والستينيات ، استمر تطوير الصاروخ والفضاء بوتيرة عالية. وقعت الأحداث الرئيسية التي حددت المزيد من التطوير للملاحة الفضائية بانتظام يحسد عليه ، وغالبًا ما كانت تفصل بينها بضعة أشهر. في الوقت نفسه ، تم توظيف عدد كبير من الشركات والمتخصصين من مختلف المجالات في الصناعة ، مما ساهم في الحل السريع للمشاكل.
تتضح هذه الاتجاهات بشكل جيد من خلال تطور أنظمة التحكم في المركبات الفضائية والسفن. لذلك ، في عام 1957 ، ذهب Sputnik-1 إلى المدار دون أي وسيلة تحكم ، وبالفعل في عام 1960 ، تم تصنيع وإطلاق AMS مع كمبيوتر متعدد الوظائف على متن الطائرة. في الوقت نفسه ، تم تشكيل الأفكار والمفاهيم الرئيسية ، والتي لا تزال مستخدمة في الملاحة الفضائية - ولكن بالفعل على المستوى التقني الحديث.
معلومات